Current brain and neural interfacing technologies still face significant limitations to become accessibility tools that can benefit people. On the one hand, non-invasive neural interface technology (e.g. EEG, EMG) is intrinsically unidirectional and of limited capacity. On the other hand, invasive technology (e.g. percutaneous EMG, implanted nerve electrodes or intracranial electroencephalography) while allowing two-directionality and better performance still relies on complex surgical procedures.
EXTEND aims at developing the novel concept of Bidirectional Hyper-Connected Neural Systems (BHNS) to extend the capabilities of neural interfaces with minimally invasive communication links between multiple nerves in the body and multiple external devices. EXTEND will realise BHNS by developing disruptive wireless neuromuscular (injectable) interface technology that enables distributed stimulation, sensing, processing and analysis of neuromuscular activity, the ultimate stance of the neural code of movement.
The EXTEND project will showcase the advantages of this new technology in two applications: (1) tremor management in essential tremor (ET) and Parkinson disease (PD), and (2) neural interfaced assistive wearable robots for spinal cord injury (SCI). EXTEND will also work towards a community hub that brings together stakeholders to create an innovation ecosystem that can nurture the fast development of neural interfaces around the new concept.
The objective of EXTEND is to develop all the necessary tools to achieve a minimally invasive bidirectional neural interface platform capable of distributed stimulation and sensing of neuromuscular activity, for attaining what we refer to as Bidirectional Hyper-connected Neural System, BHNS.
EXTEND will develop the technology for Bidirectional Hyper-connected Neural Systems (BHNS). These systems will allow a real-time, bidirectional connection between a dense network of implanted wireless micro stimulators/sensors and a multitude of external devices and tools. This network will create novel channels of communications between various sensory and motor nerves, providing the means of a synthetic chain of action-reaction of sensorimotor activity.
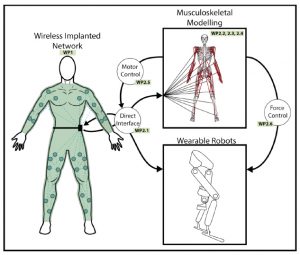
Consequently, it will be possible to modulate muscle activity or sensory perception by neuromuscular stimulation based not only on measured local information (e.g. volitional activation, reflex activation), but also on the activity measured at other parts of the body. Furthermore, it will be possible to control external devices (e.g. wearable robots) by the real time neuromuscular activity at multi-sites of the body. These external devices can then be used as a closed loop to modify the sensorimotor behaviour to correct movement disorders (e.g. in pathological tremor suppression).